在BatchNorm广泛应用之后,关于BN的一些思考也被提出,希望能从bacth本身的采样等方法里探讨,不同的batch会有什么样的不同效果。详见ref[1]。
本文简述其中涉及的四大实验,每个实验涉及一些子结论。
Rethinking BatchNorm
BatchNorm相对于其他算子来说,主要的不同在于BN是对batch数据进行操作的。BN在batch数据中进行统计量计算,而其他算子一般都是独立处理单个样本的。因此影响BN的输出不仅仅取决于单个样本的性质,还取决于batch的采样方式。
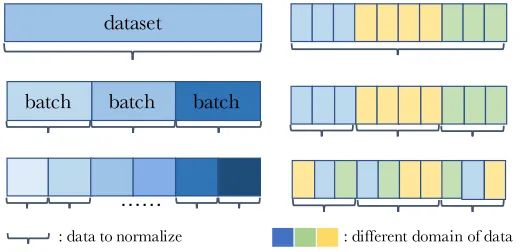
如图所示,左右各举例了三种batch采样方式。
其中左图三种batch采样方式分别为:
- entire dataset;
- mini-batches;
- subset of mini-batches
右图三种batch采样方式分别为:
- entire domain;
- each domain;
- mixture of each domain
PreciseBN
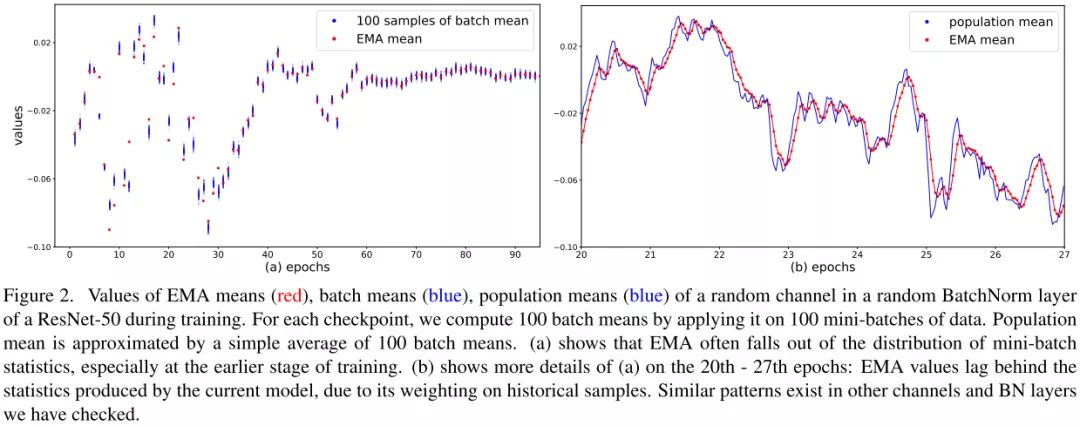
BN中统计量的计算默认使用EMA方法,但是作者实验发现EMA会导致模型性能次优,然后提出了PreciseBN方法,近似将整个训练集统计量作为一个batch。
EMA,exponential moving average,指数移动平均,可以用来有效地计算总体统计,但是可能会存在一些不良情况。
\[\mu_{EMA}\leftarrow\lambda\mu_{EMA}+(1-\lambda)\mu_\beta\] \[\sigma^2_{EMA}\leftarrow\lambda\sigma^2_{EMA}+(1-\lambda)\sigma^2_{\beta}\]不难看出$\mu_{EMA}$和$\sigma^2_{EMA}$根据权重值$\lambda$不断更新,但是导致次优解的原因也是在于:
- 当$\lambda$太大时,统计量收敛速度变慢;
- 当$\lambda$太小时,会受到newest的几个mini-batch影响更大,统计量无法表示整个training set samples的统计量。
为了得到整个训练集更加精确的统计量,PreciseBN采用了两点小技巧:
- 将相同模型用于多个mini-batches来收集batch统计量
- 将多个batch收集的统计量聚合成一个population统计量
比如有N个样本需要通过数量为的Bmini-batch进行PreciseBN统计量计算,那么需要计算$k=\frac{N}{B}$次,统计量聚合公式为:
\[\mu_{pop}=E[\mu_\beta]\] \[\sigma^2_{pop}=E[\mu^2_\beta+\sigma^2_\beta]-E[\mu_\beta]^2\]相比于EMA,PreciseBN有两点重要的属性:
- PreciseBN的统计量是通过相同模型计算得到的,而EMA是通过多个历史模型计算得到的。
- PreciseBN的所有样本的权重是相同的,而EMA不同样本的权重是不同的。
最后实验得出结论:
- 推理时使用PreciseBN会更加稳定。
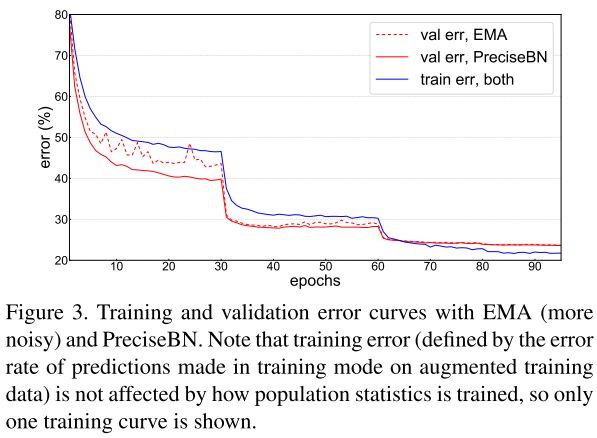
- 大batch训练对EMA影响更大。
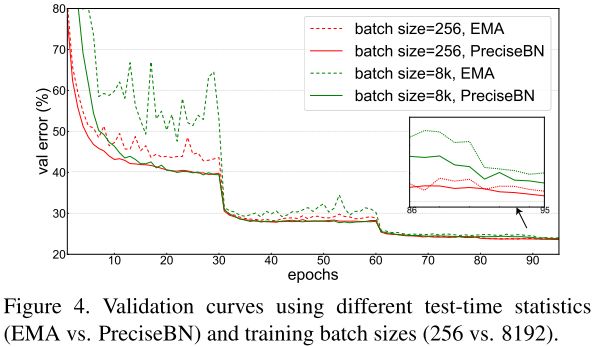
- PreciseBN只需要$10^3$~$10^4$个样本可以得到近似最优。
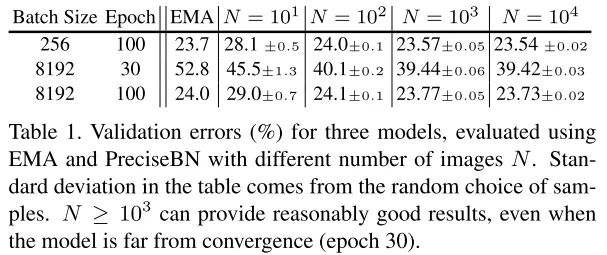
- 小batch会产生统计量积累错误。
Batch in Training & Testing
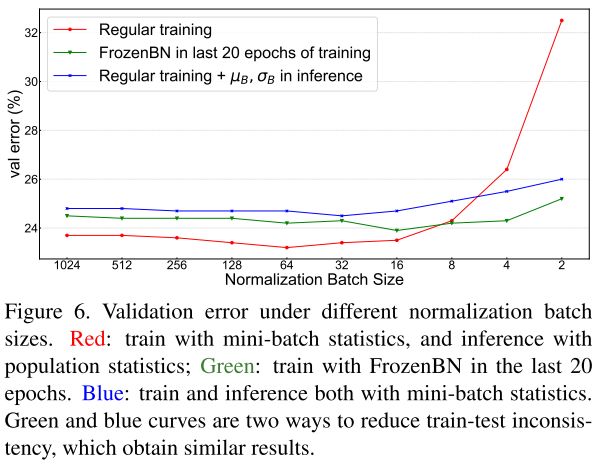
BN在训练和测试中行为不一致:训练时,BN的统计量来自mini-batch;测试时,BN的统计量来自population。这部分主要探讨了BN行为不一致对模型性能的影响,并且提出消除不一致的方法提升模型性能。
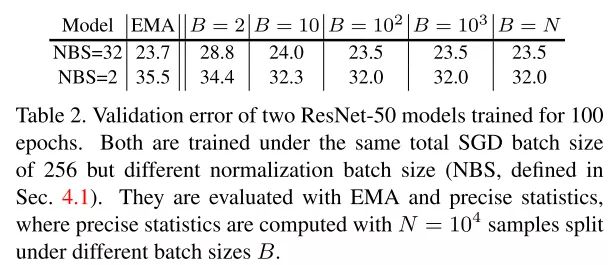
为了避免混淆,将SGD batch size或者total batch size定义为所有GPU上总的batch size大小,将normalization batch size定义为单个GPU上的batch size大小。
normalization batch size对training noise和train-test inconsistency有着直接影响:使用更大的batch,mini-batch统计量越接近population统计量,从而降低training noise和train-test inconsistency。
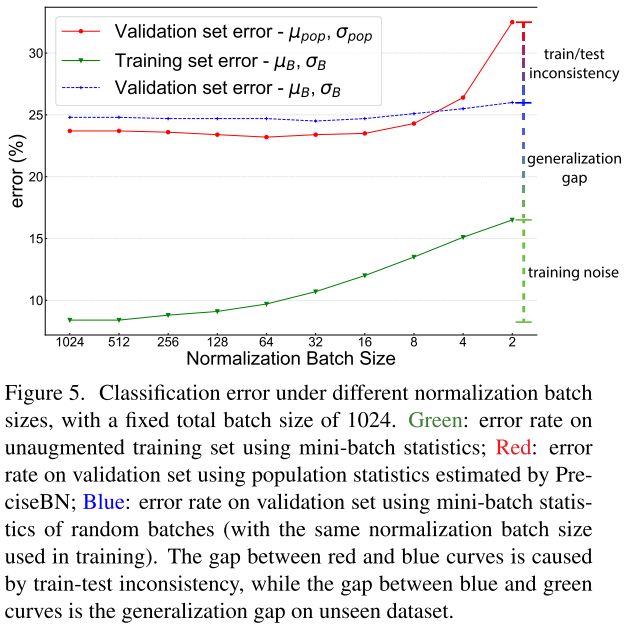
- Training noise:当normalization batch size非常小时,单个样本会受到同一个min-batch样本的严重影响,导致训练精度较差,优化困难。
- Generalization gap:随着normalization batch size的增加,mini-batch的验证集和训练集的之间的泛化误差会增大,这可能是由于training noise和train-test inconsistency没有正则化。
- Train-test inconsistency:在小batch下,mini-batch统计量和population统计量的不一致是影响性能的主要因素。当normalization batch size增大时,细微的不一致可以提供正则化效果减少验证误差。在mini-batch为32~128之间时,正则化达到平衡,模型性能最优。
为了保持train和test的BN统计量一致,作者提出了两种方法来解决不一致问题:
- 一种是推理的时候使用mini-batch统计量,
- 另一种是训练的时候使用population batch统计量。这里作者采用FrozenBN的方法,先选择第80个epoch模型,然后将所有BN替换成FrozenBN,然后训练20个epoch。
Batch from different Domain
BN的训练过程分为:
- 通过SGD学习features,
- 由这些features得到population统计量。
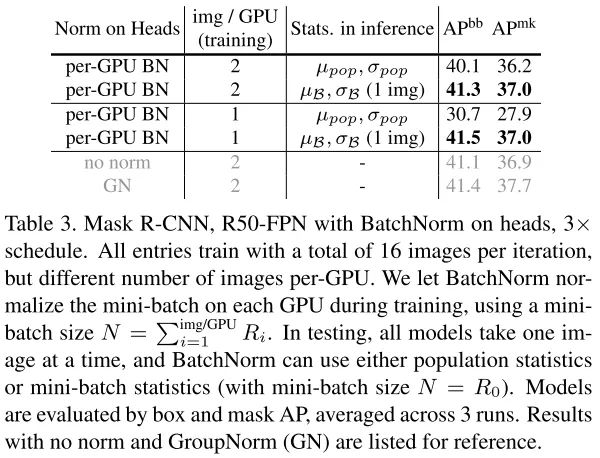
由于BN多了一个population统计阶段,导致训练和测试之间的domain shift。当数据来自多个doman时,SGD training、population statistics training和testing三个步骤的domain gap都会对泛化性造成影响。
实验主要探究了两种使用场景:
- 模型在一个domain上进行训练,然后在其他domain上进行测试;
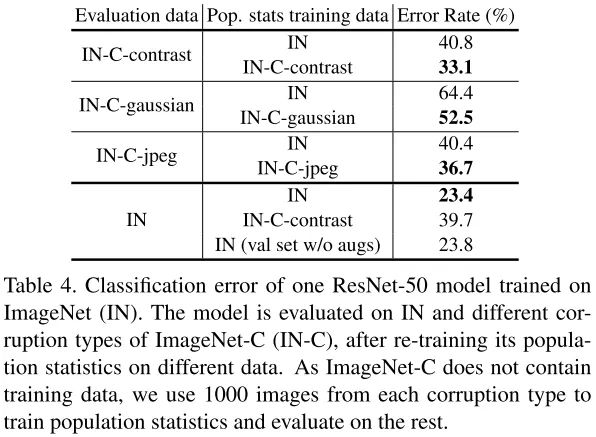
- 模型在多个domain上进行训练。
结论:
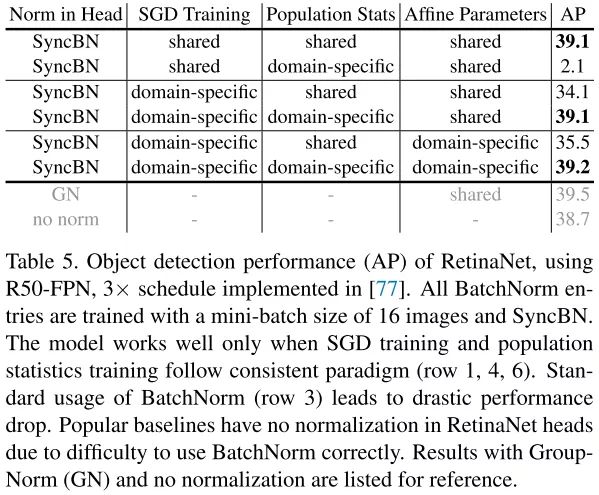
- 当存在显著的domain shift时,模型使用评估domain的population统计量会得到更好的结果,可以缓解训练测试的不一致。
- SGD training、population statistics training和testing保持一致是非常重要的,并且全部使用domain-specific能取得最好的效果。
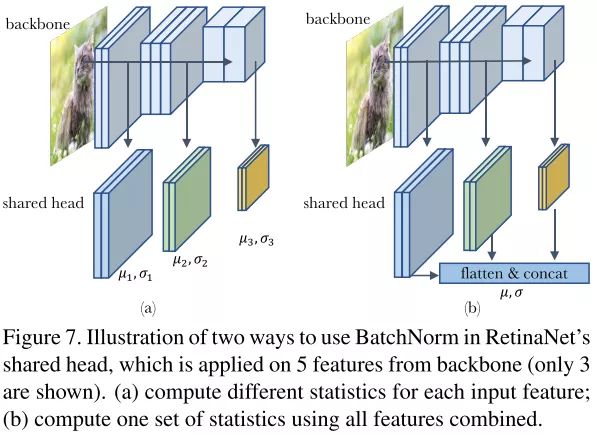
Information Leaking within a Batch
BN在使用中还存在一种information leakage现象,因为BN是对mini-batch的样本计算统计量的,导致在样本进行独立预测时,会利用mini-batch内其他样本的统计信息。
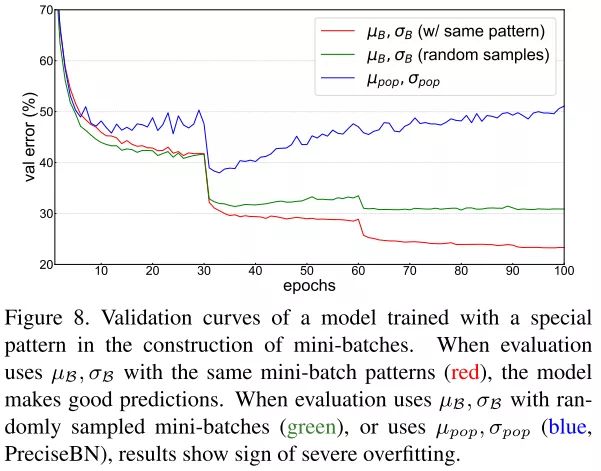
作者实验发现,当使用random采样的mini-batch统计量时,验证误差会增加,当使用population统计量时,验证误差会随着epoch的增加逐渐增大,验证了BN信息泄露问题的存在。
解决方法:
- 使用SyncBN,来弱化mini-batch内样本之间的相关性。
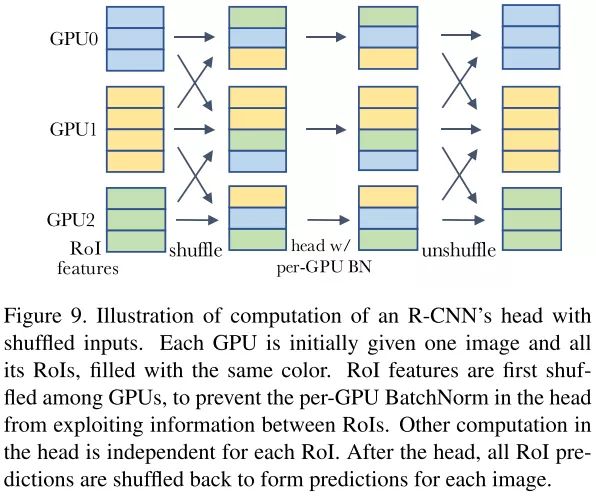
- 在进入head之前在GPU之间随机打乱RoI features,这给每个GPU分配了一个随机的样本子集来进行归一化,同时也削弱了min-batch样本之间的相关性。
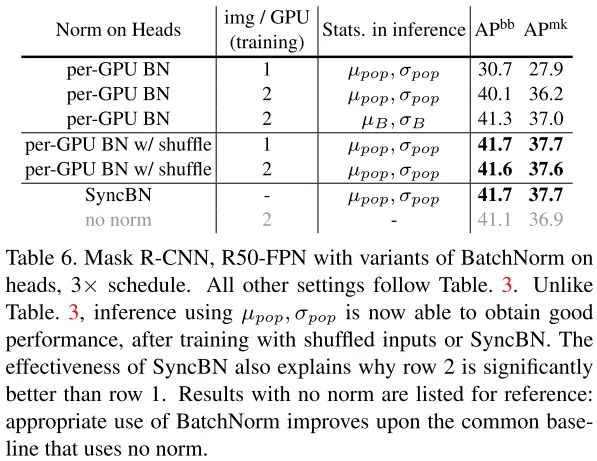
实验结果表明,shuffling和SyncBN都能有效地处理信息泄漏,使得head在测试时能够很好地泛化。在速度方面,我们注意到shuffling需要更少的跨gpu同步,但是shuffling每次传输的数据比SyncBN多。因此,shuffling和SyncBN的相对效率跟具体模型架构相关。
Group Normalization
由于BN存在于上文所提到的一些基于batch的问题,所以Group Normalization是Face book AI research(FAIR)吴育昕-何恺明联合推出用于改进和替代BN的方法。
What is GN
GN本质上仍是归一化,但是它灵活的避开了BN的问题,同时又不同于Layer Norm,Instance Norm,四者的关系如下:
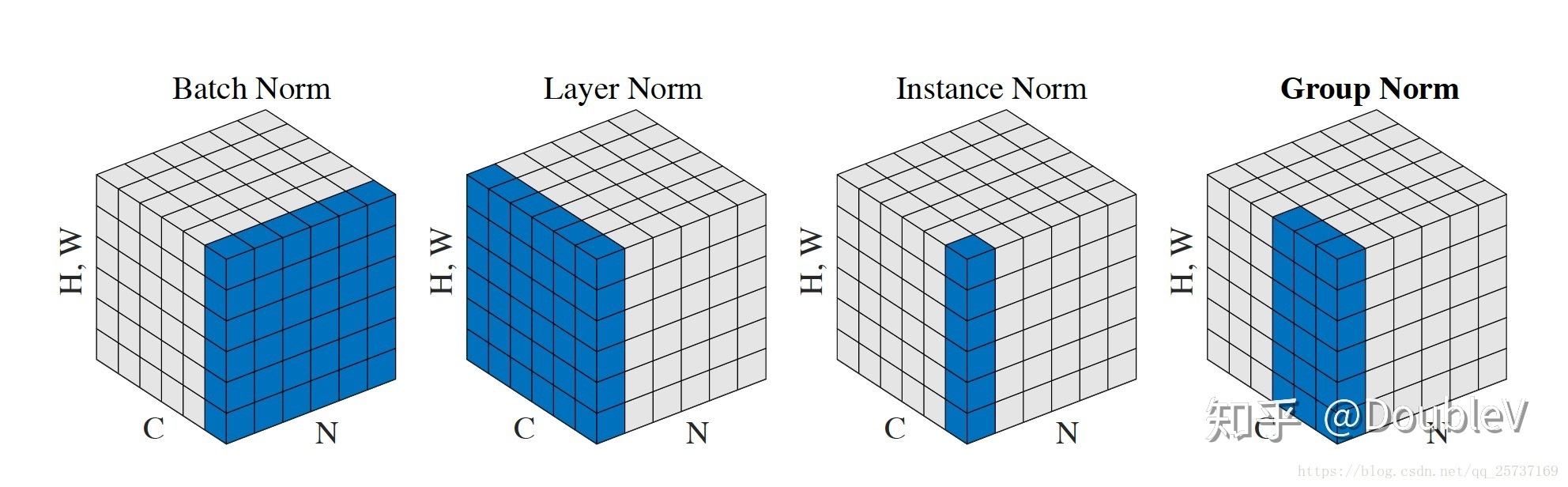
从左到右以此是BN,LN,IN,GN。 深度网络中的数据维度一般是[N, C, H, W]或者[N, H, W,C]格式,N是batch size,H/W是feature的高/宽,C是feature的channel,压缩H/W至一个维度,其三维的表示如上图,假设单个方格的长度是1,那么其表示的是[6, 6,*, * ]。
- BN在batch的维度上norm,归一化维度为[N,H,W],对batch中对应的channel归一化;
- LN避开了batch维度,归一化的维度为[C,H,W];
- IN归一化的维度为[H,W];
- 而GN介于LN和IN之间,其首先将channel分为许多组(group),对每一组做归一化,及先将feature的维度由[N, C, H, W]reshape为[N, G,C//G , H, W],归一化的维度为[C//G , H, W]
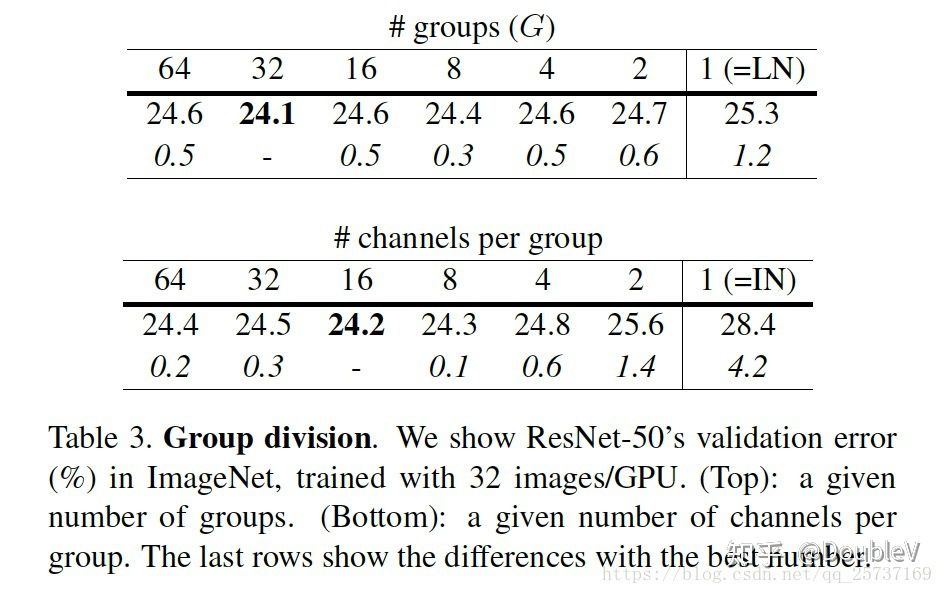
事实上,GN的极端情况就是LN和I N,分别对应G等于C和G等于1,作者在论文中给出G设为32较好。
给出的实践代码:
def GroupNorm(x, gamma, beta, G, eps=1e-5):
# x: input features with shape [N,C,H,W]
# gamma, beta: scale and offset, with shape [1,C,1,1]
# G: number of groups for GN
N, C, H, W = x.shape
x = tf.reshape(x, [N, G, C // G, H, W])
mean, var = tf.nn.moments(x, [2, 3, 4], keep dims=True)
x = (x - mean) / tf.sqrt(var + eps)
x = tf.reshape(x, [N, C, H, W])
return x * gamma + beta
其中$\beta$和$\gamma$参数是norm中可训练参数,表示平移和缩放因子。
Why GN works?
传统角度来讲,在深度学习没有火起来之前,提取特征通常是使用SIFT,HOG和GIST特征,这些特征有一个共性,都具有按group表示的特性,每一个group由相同种类直方图的构建而成,这些特征通常是对在每个直方图(histogram)或每个方向(orientation)上进行组归一化(group-wise norm)而得到。而更高维的特征比如VLAD和Fisher Vectors(FV)也可以看作是group-wise feature,此处的group可以被认为是每个聚类(cluster)下的子向量sub-vector。
从深度学习上来讲,完全可以认为卷积提取的特征是一种非结构化的特征或者向量,拿网络的第一层卷积为例,卷积层中的的卷积核filter1和此卷积核的其他经过transform过的版本filter2(transform可以是horizontal flipping等),在同一张图像上学习到的特征应该是具有相同的分布,那么,具有相同的特征可以被分到同一个group中,按照个人理解,每一层有很多的卷积核,这些核学习到的特征并不完全是独立的,某些特征具有相同的分布,因此可以被group。
导致分组(group)的因素有很多,比如频率、形状、亮度和纹理等,HOG特征根据orientation分组,而对神经网络来讲,其提取特征的机制更加复杂,也更加难以描述,变得不那么直观。另在神经科学领域,一种被广泛接受的计算模型是对cell的响应做归一化,此现象存在于浅层视觉皮层和整个视觉系统。
作者基于此,提出了组归一化(Group Normalization)的方式,且效果表明,显著优于BN、LN、IN等。
GN的归一化方式避开了batch size对模型的影响,特征的group归一化同样可以解决Internal Covariate Shift的问题,并取得较好的效果。
How it works?
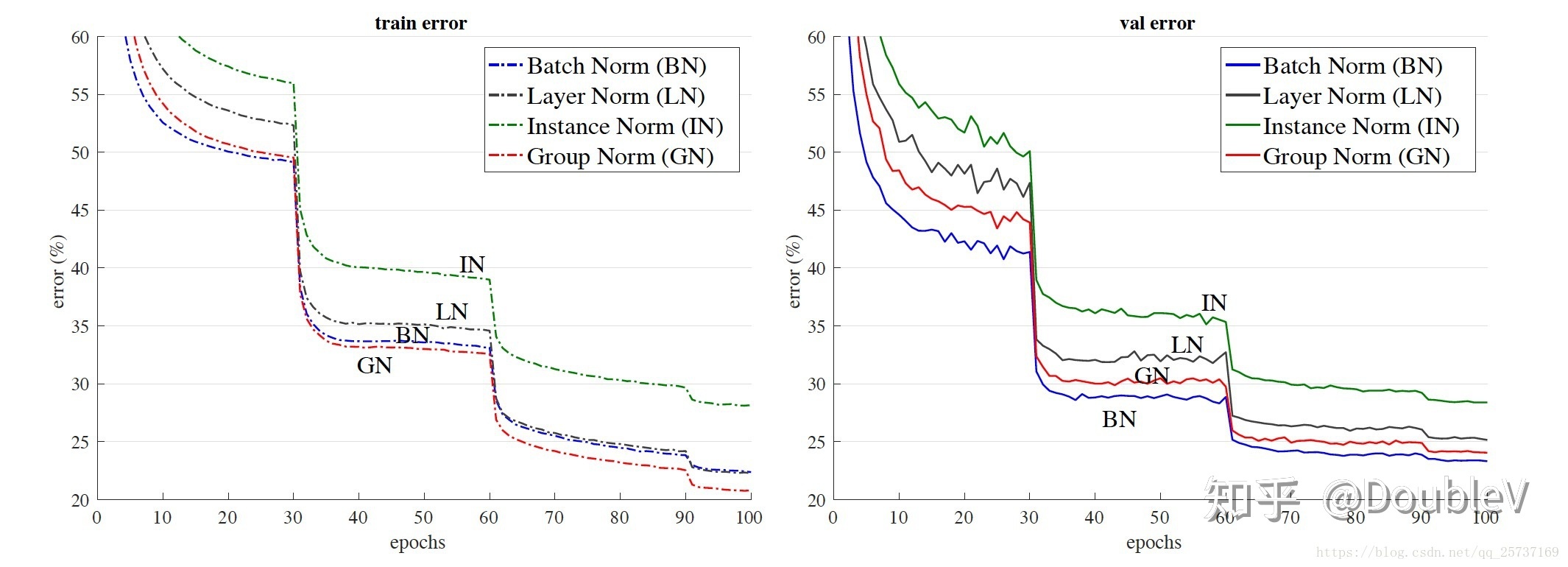
以resnet50为base model,batchsize设置为32在imagenet数据集上的训练误差(左)和测试误差(右)。GN没有表现出很大的优势,在测试误差上稍大于使用BN的结果。
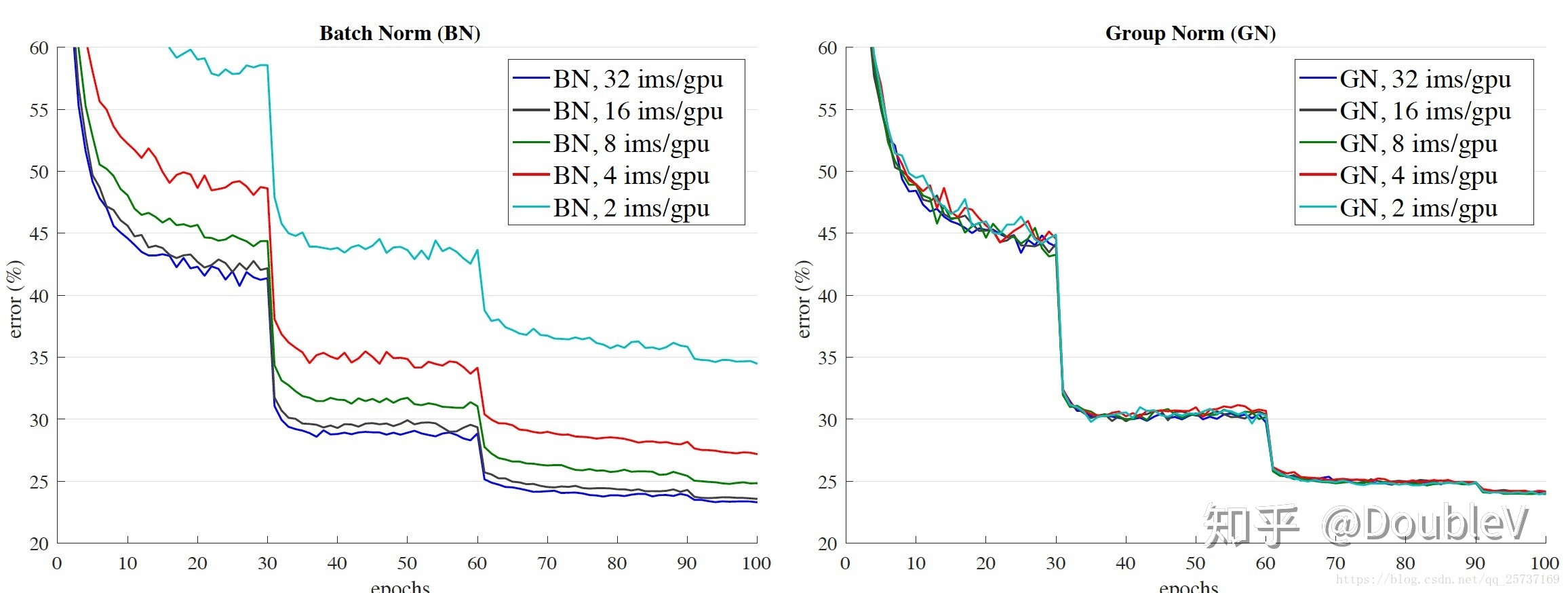
可以很容易的看出,GN对batch size的鲁棒性更强。
同时,作者以VGG16为例,分析了某一层卷积后的特征分布学习情况,分别根据不使用Norm 和使用BN,GN做了实验,实验结果如下:
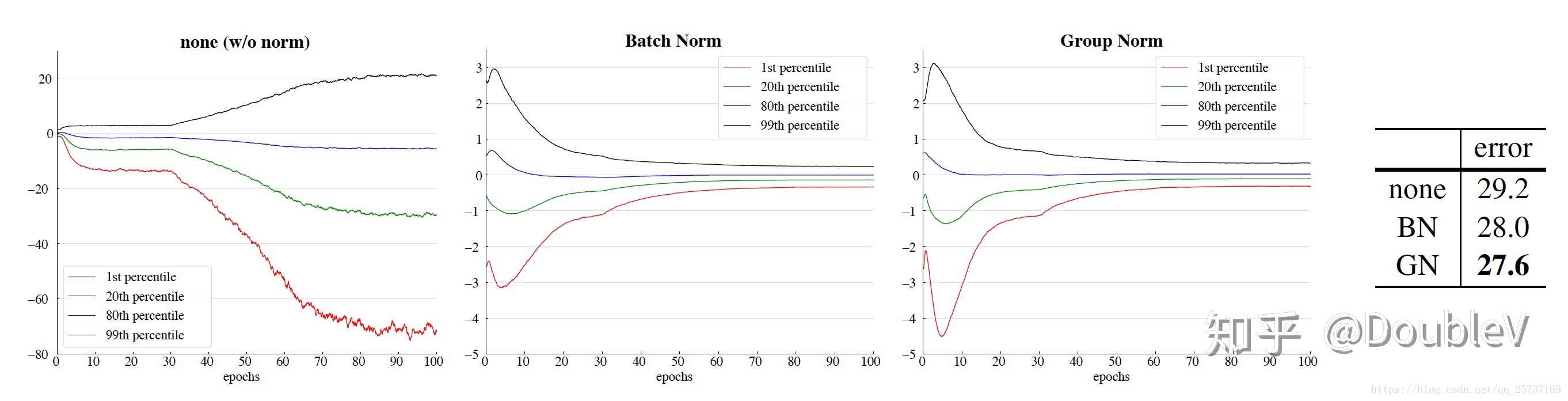
统一batch size设置的是32,最左图是不使用norm的conv5的特征学习情况,中间是使用了BN结果,最右是使用了GN的学习情况,相比较不使用norm,使用norm的学习效果显著,而后两者学习情况相似,不过更改小的batch size后,BN是比不上GN的。
作者同时做了实验展示了GN在object detector/segmentation 和video classification上的效果,详情可见原文,此外,作者在paper最后一节中大致探讨了discussion and future work , 实乃业界良心。